Skip to content
Main Menu
Home
Physics
Menu Toggle
Newtonian Mechanics
Classical Mechanics
Electromagnetism
Mathematical Physics
Quantum Mechanics
B.Ed.
Menu Toggle
Knowledge and curriculum
Teaching and learning
Language Across The Curriculum
Contemporary India and Education
Home
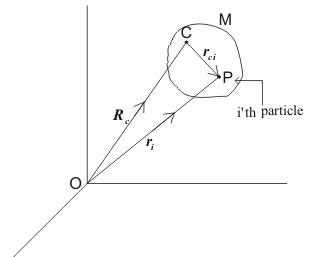
center-of-mass
center-of-mass
By
physicscatalyst
/
September 11, 2016
←
Previous Media