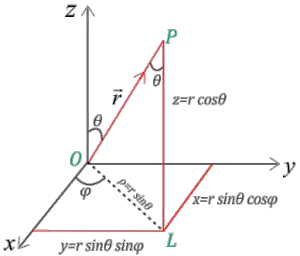
Rectangular to spherical coordinates
\begin{align}
x&=r\sin \theta \cos\varphi \\
y&=r\sin \theta \sin \varphi \\
z&=r\cos \theta
\end{align}
Spherical polar coordinates in terms of Cartesian coordinates are
\begin{align}
r&=\sqrt{{{x}^{2}}+{{y}^{2}}+{{z}^{2}}} \\
\tan \theta &=\frac{\sqrt{{{x}^{2}}+{{y}^{2}}}}{z} \\
\tan \varphi & =\frac{y}{z}
\end{align}
Solved Problems on Spherical Polar co-ordinates
Question 1
How to Find Kinetic energy in terms of \((r,\theta ,\phi )\)
Solution 1
We have to find the kinetic energy in terms of \((r,\theta ,\phi )\) that is in terms of spherical c0-ordinates. Kinetic energy in terms of Cartesian co-ordinates is
\(T = \frac{1}{2}m\left( {{{\dot x}^2} + {{\dot y}^2} + {{\dot z}^2}} \right)\) (1)
Where \(\dot x,\dot y{\rm{ and }}\dot z\) are derivatives of z, y and z with respect to time.
Cartesian co-ordinates x, y, z in terms of \(r,\theta \) and \(\phi \) are
\(\begin{array}{l}x = r\sin \theta \cos \phi \\y = r\sin \theta \sin \phi \\z = r\cos \theta \end{array}\)
Now derivatives of x, y and z w.r.t. $t$ is
\(\begin{array}{l}\dot x = \frac{{dx}}{{dt}} = \dot r\sin \theta \cos \phi + r\cos \theta \cos \phi \dot \theta – r\sin \theta \sin \phi \dot \phi \\\dot y = \frac{{dy}}{{dt}} = \dot r\sin \theta \sin \phi + r\cos \theta \sin \phi \dot \theta + r\sin \theta \cos \phi \dot \phi \\\dot z = \frac{{dz}}{{dt}} = \dot r\cos \theta – r\sin \theta \dot \theta \end{array}\)
Where
\(\dot r = \frac{{dr}}{{dt}},\dot \theta = \frac{{d\theta }}{{dt}},\dot \phi = \frac{{d\phi }}{{dt}}\)
means all \(r,\theta \) and \(\phi \) changes with time as the particle moves or changes its position with time.
Now calculate for
\({\dot x^2},{\dot y^2},{\dot z^2}\)
and add them. After adding them we get
\({(\dot x)^2} + {(\dot y)^2} + {(\dot z)^2} = {\dot r^2} + {r^2}{\dot \theta ^2} + {r^2}{\sin ^2}\theta {\dot \phi ^2}\)
Putting this value of \({(\dot x)^2} + {(\dot y)^2} + {(\dot z)^2}\)in equation 1 we get kinetic energy of particle or system in terms of \(r,\theta \) and \(\phi \).
Hence,
\(T = \frac{1}{2}m({\dot r^2} + {r^2}{\dot \theta ^2} + {r^2}{\sin ^2}\theta {\dot \phi ^2})\)
spherical coordinates unit vectors
1. $\hat {r} $: points towards the $r$ axis that is in the direction of the vector $\vec r$ along which only coordinate $r$ changes. We can also write$\vec r= r \hat {r}$.
2. $\hat {\theta}$: Unit vector $\hat {\theta}$ is tangent at $P$ to circle $SPT$ . Displacement along this circle only changes coordinate.
3. $\hat {\varphi}$: This unit vector is also tangent at $P$ if circle under consideration is $PP’$ produced by rotation of $OP$ along the z-axis. Displacement along this circle only changes $\varphi$.
The general differential displacement for any particle P in spherical polar coordinate is
$$d\vec{r}=dr\hat{r}+rd\theta \hat{\theta }+r\sin\theta d\varphi \hat{\varphi}$$
The unit vectors $\hat {r}$ ,$\hat {\theta}$ and $\hat {\varphi}$ can be expressed in terms of $\hat i$ , $\hat j$ and $\hat k$ :
\begin{align}
\hat {r} = \sin \theta \cos\varphi \hat i + \sin \theta \sin\varphi \hat j + \cos\theta \hat k \\
\hat {\theta } = \cos \theta cos\varphi \hat i + \cos \theta \sin\varphi \hat j – \sin \theta \hat k \\
\hat {\varphi } = – \sin \varphi \hat i + \cos \varphi \hat j
\end{align}
The unit vectors $\left( \widehat{r},\widehat{\theta },\widehat{\varphi } \right)$ , unlike $\left( \hat{i},\hat{j},\hat{k} \right)$ are not constant vectors but change in direction as co-ordinates $\theta$ and $\varphi$ change. At each point they constitute an orthogonal right handed co-ordinate system, that is we have
\begin{align}
\hat{r}\cdot \hat{\varphi}&=\hat{r}\cdot \hat{\theta}=\hat{\theta}\cdot \hat{\varphi}=0 \\
\hat{r}\times \hat{\theta} &=\hat{\varphi} \\
\hat{\theta }\times \hat{\varphi }&=\hat{r} \\
\hat{\varphi}\times \hat{r}&=\hat{\theta}
\end{align}
Reference books
1. Mechanics Paperback – 2007 by P.K. Srivastava
2. MECHANICS Paperback – 14 Jul 2003 by H Hans (Author), S Puri (Author)
Reference material for further reading
1. Refer this link to determine the spherical unit vectors in terms of Cartesian coordinates
http://web.physics.ucsb.edu/~fratus/phys103/Disc/disc_notes_3_pdf.pdf
2. http://planetmath.org/unitvectorsincurvilinearcoordinates to know more about curvilinear coordinates
3. Find extra stuff at this link http://mathworld.wolfram.com/SphericalCoordinates.html
Definitely, there is much much more information to be added to this topic. I’ll do it some other time.