We have already studied motion with constant acceleration while studying translational motion
Now we will study the rotational motion with constant angular acceleration
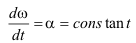
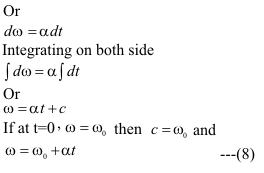
when a rigid body rotates with constant acceleration we have
Thus we have
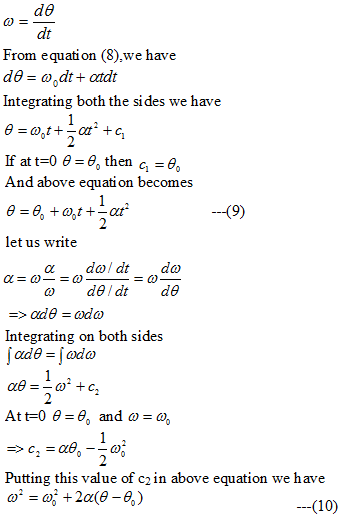
Again we have angular velocity
Equation (8) ,(9) and (10) are the equation of motion with constant angular acceleration
Question 1. A wheel initially has an angular velocity of 18 rad/s. It has a constant angular acceleration of 2.0 rad/s2 and is
slowing at first. What time elapses before its angular velocity is 18 rad/s in the direction opposite to its initial
angular velocity?