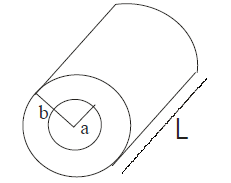
Noting that the mass M of the cylindrical shell is $\rho$ times the volume of the shell $\pi\rho L\left(b^2-a^2\right)$. The moment of inertia of a shell of thickness dr is $dl=\left(\rho2\pi rLdr\right)r^2$, the term in the parentheses being the mass of the thin shell. Then
Answer
$I=2\pi\rho L\int_{a}^{b}{r^3dr}=\frac{2\pi\rho L\left(b^4-a^4\right)}{4}$
Substituting for $\rho$, write
$I=\frac{\pi\rho L\left(b^2-a^2\right)\left(b^2+a^2\right)}{2}=\frac{M\left(b^2+a^2\right)}{2}$
The problem is diagrammed in figure given below
Answer
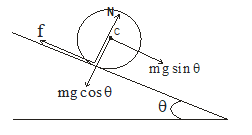
We let denote the angular acceleration (clockwise positive) and a, denotes the linear acceleration along the inclined. If there is no slipping, then $v=\omega R$, where v and $\omega$ are the linear and angular velocities. Similarly, $a=\alpha R$, where a and $\alpha$ are the linear and angular accelerations. The translational acceleration is given by
$a=gsin{\theta}-\frac{f}{M}$,
Where f is the fractional force. Neither the sphere's weight nor the normal exert any torque about C, the centre of the uniform sphere. Therefore the angular acceleration is given by
$\alpha=\frac{fR}{I_c}=\frac{5f}{2MR} and a=\frac{5f}{2M}$
Solving the displayed equation for f we get $f=\frac{2}{5}Mgsin{\theta}$. The normal force $N=Mgcos{\theta}$, so. Since the maximum ratio $\left(\frac{f_{max}}{N}\right)$ consistent with pure rolling is $\mu_s$, we must have . For $\theta=30^0$, , so we can find $\left(\mu_s\right)_{min}=\frac{2}{7\sqrt3}=0.165$.
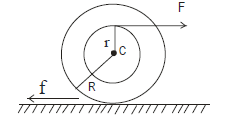
(a) the translational form of Newton s second law implies that $Ma_C=F-f$, while the rotational form implies that $Ff+fR=M{G^2}_C\alpha$ where $\alpha$ is angular acceleration. If there is no slippage, then $\alpha=\frac{a_C}{R}$.Solving this equation for f, we find
Answer
$f=\frac{F\left({G^2}_C-rR\right)}{\left({G^2}_C+R^2\right)}$ as described
(b) Where $r\equiv r_0=\frac{{G^2}_C}{R}$, the fractional force vanished.
(a) Moment of inertia of the circular disc is given by
Answer
$I=\frac{1}{2}MR^2$
(b) $K=\frac{1}{2}I\omega^2$
So, $K=\frac{1}{4}MR^2\omega^2$
(c) $L=I\omega$
So, $L=\frac{1}{2}MR^2\omega$
(d) Moment of inertia of the second circular disc is given by
$I=\frac{1}{2}MR^2$
Now since no external torque is applied, Angular momentum will be conserved
$L_{before}=\frac{1}{2}MR^2\omega$
Let $\omega _{final}$ be the angular velocity of the system
Then , $L_{after}=(\frac{1}{2}MR^2+\frac{1}{2}MR^2)\omega_{final}$
Now
$L_{before}=L_{after}$
So
$\omega_{final}=\frac{\omega}{2}$
Let v be the velocity of the centre of mass of the rod and $\omega$ be the angular velocity of the rod about centre of mass of the rod
Answer
Taking small body + rod as a system,
A) Since there is no external force present, Linear momentum will be conserved
B) Since there is no external torque present, angular momentum will be conserved
Velocity of the mass m after the collision
$=v +(L/2) \omega$
Now applying conservation of linear momentum
$mu=m[v +(L/2) \omega] + Mv$ ---(1)
Now applying the conservation of angular momentum about the point of collision
$0=\frac{ML^2}{12}\omega-\frac{MvL}{2}$
$\omega=\frac{6v}{L}$
Substituting this value in equation 1
$mu=m(v+\frac{6vL}{2L})+Mv$
$mu=mv+3mv+Mv$
$v=\frac{mu}{(4m+M)}$
So
$\omega=\frac{6mu}{L(4m+M)}$
When the disc is placed on the floor, frictional forces will oppose the motion of the disc.
Answer
It is the moment of the frictional force which brings the disc to rest
Let us consider a elementary strip of disc of thickness dr at a distance r from the centre
Now Area of the elementary strip=$2 \pi rdr$
Mass per unit area=$\frac {M}{\pi R^2}$
So mass of the elementary strip
$ =(\frac {M}{\pi R^2}) (2 \pi rdr)$
Frictional forces on this strip
$df=\mu (\frac {M}{\pi R^2}) (2 \pi rdr)g$
Now torque due to friction
$d \tau=df \times r = \mu (\frac {M}{\pi R^2}) (2 \pi rdr)gr$
The disc can be assumed to be made of several of these elementary discs
So total torque of the disc
$=\int{[\mu(\frac{M}{\pi R^2})(2\pi rdr)gr}$
$=\frac{2\mu Mg}{R^2}\int_{0}^{R}{r^2dr}$
$=\frac{2\mu Mg}{R^2}(\frac{R^3}{3})$
Now Torque
$\tau=I\alpha$ ----(1)
Moment of inertia of disc=$\frac{MR^2}{2}$
Substituting the above values in equation 1
We have
$\alpha=\frac{4\mu g}{3R}$
Since it is deceleration
$\alpha=-\frac{4\mu g}{3R}$
Now we know of rotational kinematics
$\omega=\omega_0+\alpha t$
Here $\omega=0$
So
$t=\frac{3\omega_0R}{4\mu g}$
Kinetic energy of the disc is given by
$=\frac{1}{2}I\omega^2$
Now
$I =\frac{MR^2}{2}$
Now we know of rotational kinematics
$\omega=\omega_0+\alpha t$
$\omega=\omega_0-\frac{4\mu gt}{3R}$
So Kinetic energy
$=\frac{1}{2}(\frac{MR^2}{2})(\omega_0-\frac{4\mu gt}{3R})^2$
$=\frac{MR^2}{4}(\omega_0-\frac{4\mu gt}{3R})^2$

Consider the figure given below
Answer
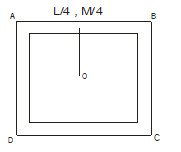
The length of each side=L/4
The mass of each side=M/4
The moment of inertia of any one of the side about an axis perpendicular to it (normal to the plane of paper) and passing through centre of mass of the side is given by
$I_1=\frac{ML^2}{12}=\frac{ML^2}{4*12*16}$
$=\frac{ML^2}{768}$
Now by the theorem of parallel axis, the moment of inertia of this side about an axis passing through centre O and perpendicular to the plane of square is given by
$I'=I_1+mh^2$
Now here h=L/8
So
$I'=\frac{ML^2}{768}+\frac{ML^2}{256}=\frac{ML^2}{192}$
So moment of inertia of the whole square about O =4I'=$\frac{ML^2}{48}$