Kinetic energy of the Rolling body is given by
Answer(1-6)
$K=\frac{1}{2}mv^2\left(1+\frac{k^2}{R^2}\right)$
Where k is the radius of gyration of the body and v is the velocity of the center of mass of the body
Now from the law of conservation of energy
Potential energy lost=Kinetic energy gained
So,
$mgH=\frac{1}{2}mv^2\left(1+\frac{k^2}{R^2}\right)$
Or
$v^2=\left(\frac{2gH}{1+\frac{k^2}{R^2}}\right)$
So velocity of center of mass is independent of the mass of the body
Now for Ring
$k^2=R^2$
So
$v_{ring}=\sqrt{gH}$
Now for Solid Cylinder
$k^2=R^2/2$
So
$v_{solid}=\sqrt{\frac{4gH}{3}}$
Now of Solid Sphere
$k^2=2R^2/5$
So
$v_{sphere}=\sqrt{\frac{10gH}{7}}$
So it is clear that
$v_{sphere} > v_{solid} > v_{ring}$
now also
$\omega=\frac {v}{R}$
So Angular velocity will also be same
Hence the Answers are
(1) d
(2) c
(3) a
(4) a
(5) b
(6) c

$I=m\left(\frac{L}{4}\right)^2+2m\left(\frac{L}{3}\right)^2+3m\left(\frac{L}{2}\right)^2$
Answer
$I=\frac{149mL^2}{144}$
$\tau=g(\frac{mL}{4}+\frac{2mL}{3}+\frac{3mL}{2})$
Answer
$\tau=\frac{29mLg}{12}$
Now
$\tau=I\alpha$
Substituting the values
$\alpha=\frac{348g}{149L}$
Answer is (a)
Answer
Displacement components at time t
$x=(ucos{\theta})t$
$y=(usin{\theta})t-\frac{1}{2}gt^2$
$z=0$
Velocity components at time t
$v_x=(ucos{\theta})$
$v_y=(usin{\theta})-gt$
$v_z=0$
Now angular momentum about origin
$\mathbf{L}=\mathbf{r} \times m\mathbf{v}$
$\mathbf{L}=m(x\mathbf{i}+y\mathbf{j}) \times (v_x\mathbf{i}+v_y\mathbf{j})$
$\mathbf{L}=m(xv_y-yv_x)\mathbf{k}$
Substituting the values from displacement and velocity in above equation
$\mathbf{L}=\frac{-m(ucos{\theta})gt^2\mathbf{k}}{2}$
$\overrightarrow{\tau}=\mathbf{r} \times \mathbf{F}$
Answer
$\overrightarrow{\tau}=(x\mathbf{i}+y\mathbf{j}) \times (-mg\mathbf{j})$
$=-mgx\mathbf{k}$
$=-mg(ucos{\theta})t\mathbf{k}$

Answer is (a)
Answer
Initial angular momentum of the system
= angular momentum of the (turntable + gun) + angular momentum of the bullet
$=I_0\omega+mr^2\omega$
Answer is (d)
Answer
Let $\omega$ be the angular velocity after the firing
The absolute velocity of the bullet to the right
$=v-r\omega$
Final angular momentum of the system
$=I_0\omega-m(v-r\omega)r$
Since external torque is zero about axis of rotation, angular momentum will be conserved about the axis of rotation
$I_0\omega+mr^2\omega=I_0\omega-m(v-r\omega)r$
Or
$\omega=\omega_0+\frac{mvr}{I_0+mr^2}$
Let us assume
Answer(13-18)
$u$-> velocity of the center of mass of the system after the collision
$\omega$ -> angular velocity of the system about center of mass after collision
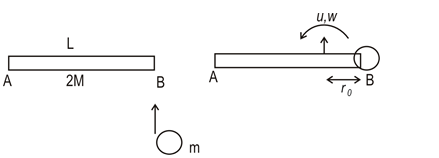
First we need to find the center of mass of the system
Let's measure the distance from end A
Then
$x_0=\frac{2M \times L/2+M \times 0}{2M+M}=\frac{L}{3}x$
Now we also need to find the moment of inertia about center of mass
We know that for rod, moment of inertia about its center of mass
$=\frac{2ML^2}{12}=\frac{ML^2}{6}$
Now using parallel axis theorem, moment of inertia about the center of mass the system
$=\frac{ML^2}{6}+2M \times \left(\frac{L}{6}\right)^2=\frac{2ML^2}{9}$
The point mass will add $M(\frac{L}{3})^2$ to the total
So
$I_{system}=\frac{2ML^2}{9}+\frac{ML^2}{9}=\frac{ML^2}{3}$
Now since no external force acts, Linear momentum remains conserved
Also since no external torque acting, angular momentum remain conserved also
Applying law of conservation of linear momentum
$Mv=3Mu$
Or
u=v/3
Applying law of conservation of angular momentum about system center of mass
$\frac{MvL}{3}=I\omega=\frac{ML^2}{3}\omega$
Or
$\omega=v/L$
Now we know the values of u and $\omega$
Velocity of Point A
$=u+\omega \times \frac{L}{3}$
$=\frac {2v}{3}$
Velocity of point B
$=u-\omega \times \frac{2L}{3}$
$=\frac {-v}{3}$
Velocity of point C
$=u-\omega \times \frac{L}{3}$
=0
Velocity of Point D
$=u-\omega(\frac{L}{2}-\frac{L}{3})$
=v/6
Let check the KE before and after collision
$KE_i=\frac{1}{2}Mv^2$
$KE_f=\frac{1}{2}(3M)u^2+\frac{1}{2}I\omega^2$
Substituting the values from above
$KE_f=\frac{1}{3}Mv^2$
Since $KE_i > KE_f$ , Energy is not conserved
Hence the Answers are
(13) (a)
(14) (a)
(15)
P ->V
Q-> U
R-> W
S-> X
(16) (a) and (b)
(17) (d)
(18) (a),(b),(c)
Angular momentum is conserved around A as no external torque is acting on the system(Rod + bullet)
Answer
Initial Angular Momentum =mvh
Final Angular Momentum= Iω
$=(mh^2+\frac{1}{3}ML^2)\omega$
So $\omega=\frac{mvh}{mh^2+\frac{1}{3}ML^2}$
Total Linear momentum =Linear momentum of mass m + Linear momentum of the center of mass of the rod
Answer
Now $v=r \omega$
So $v_m=h \omega$
and $v_{cm}=(L/2) \omega$
So Total linear momentum
=mh ω + M(L/2) ω
=(mh+ML/2)ω
Let f be the frictional force acting
Answer
Then
$-f=Ma$
So a=-f/M
Now
$v=u+at$
So
$v=v_0 \frac {ft}{M}$
Now
Torque of frictional force
=fR
Now we know that
$\tau=T\alpha$
Substituting the values
$fR=I \alpha$
or $ \alpha =\frac {f}{MR}$ as $I=MR^2$
Now we know that
$\omega=\omega_0+\alpha t$
As intial angular velocity is zero
$ \omega =\frac {ft}{MR}$
Now for no slipping condition
$v=R \omega$
$(v_0-\frac{ft}{M})=R(\frac{ft}{MR})$
Or $v_0= \frac {2ft}{M}$
Or $t=\frac {v_0M}{2f}$
Now Frictional force is given by
$f= \mu Mg$
So
$t=\frac {v_0}{2 \mu g}$
So answer is (a)
$v=v_0 \frac {ft}{M}$
Answer
Substituting the values of f and t
We get
$v= \frac {v_0}{2}$
All are correct
Answer
Total energy at the starting =$\frac{1}{2}Mv_0^2$
Total energy at pure rolling stage
=Translational KE + Rotational KE
$=\frac{1}{2}M\left(\frac{v_0}{2}\right)^2+\frac{1}{2}I\omega^2$
$=\frac{Mv_0^2}{8}+\frac{1}{2}MR^2\left(\frac{v_0}{2R}\right)^2$
$=\frac{Mv_0^2}{4}$
So loss in Energy
$=\frac{3Mv_0^2}{4}$
Answer is (b)
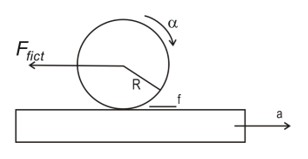
Answer
Let $a_1$ be the acceleration of the cylinder center of mass with respect to frame fixed to plank.
Let f be the frictional force acting on the cylinder
Now from Force equation
$f-F_{fict}=Ma_1$ ---(1)
Let $\alpha$ be the angular acceleration ,Then torque equation
$Rf=-I\alpha$ --(2)
Negative sign is present as torque and angular acceleration are opposite
Also
$F_{fict}=Ma$
$I=\frac{MR^2}{2}$ ----(3)
Solving equation (1),(2) and (3)
We get
$a_1=\frac{-2}{3}a$
So acceleration with respect to Ground
$=-\frac{2}{3}a+a=\frac{1}{3}a$
Answer is (a)
Answer
From Ground frame of reference, frictional force is the only force acting on the cylinder
So
$f=\frac{Ma}{3}$
Answer is (d)
Answer
For the point of cylinder which comes in contact with plank, the acceleration should be should be same as plank acceleration
$\frac{1}{3}a+R\alpha=a$
Or
$\alpha=\frac{2a}{3R}$
$\mathbf{r}=\mathbf{i}(3t^2-6t)+\mathbf{j}(-4t^3)$
Answer
Velocity vector
$\frac{d\mathbf{r}}{dt}=\mathbf{i}(6t-6)+\mathbf{j}(-12t^2)$
Acceleration vector
$\frac{d^2\mathbf{r}}{dt^2}=6\mathbf{i}-24t\mathbf{j}$
Net Force vector
$\mathbf{F}=m\mathbf{a}=6(6\mathbf{i}-24t\mathbf{j})$
Now Torque is given
$\overrightarrow{\tau}=\mathbf{r} \times\mathbf{F}$
$=[\mathbf{i}(3t^2-6t)+\mathbf{j}(-4t^3)] \times [6(6\mathbf{i}-24t\mathbf{j})]$
$=\mathbf{k}(-288t^3+864t^2)$
All are correct
Answer
Total torque about the pivot in horizontal position
$\tau=g(2ma+3ma)=5mga$
Moment of Inertial about the pivot end
$I=2ma^2+m(3a)^2=11ma^2$
Now
$\tau=I\alpha$
Or
$\alpha=\frac{\tau}{I}$
So
$\alpha=\frac{5g}{11a}$
Total torque about the pivot when the rod makes angle $\theta$ with horizontal
$\tau=g(2macos{\theta}+3macos{\theta})=5mgacos{\theta}$
So angular acceleration becomes
$\alpha=\frac{5gcos{\theta}}{11a}$
When $\theta=90$, torque becomes zero