Graphical Questions for Linear equations in Two Variable
Given below are the linear equations in two variables class 10 graph questions with amswers. These are important questions for the examination
Hope you like them and do not forget to like , social share and comment at the end of the page.
Question 1.
Draw the graphs of the following equations:
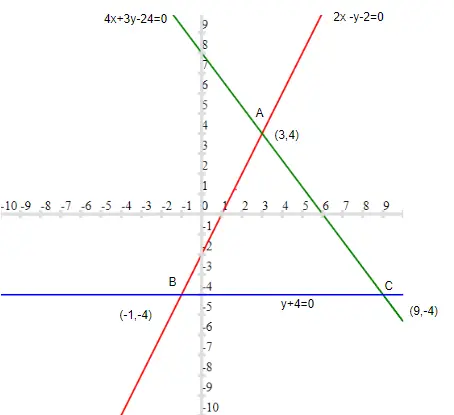
$2x - y - 2 = 0$
$4x + 3y - 24 = 0$
$y + 4 = 0$
Obtain the vertices of the triangle so obtained. Also, determine its area.
Answer
We can draw the graph as shown in below figure
Vertices of the triangle so obtained are (3,4) , (-1,-4) and (9,-4)
Area of the Triangle ABC can be calculated using
$=\frac {1}{2} Base \times Height$
$=\frac {1}{2} \times 8 \times 10= 40$
Question 2.
Determine graphically the vertices of the triangles, the equations of whose sides are given below:
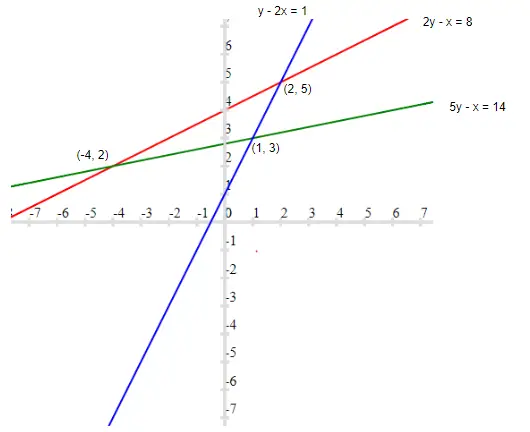
(i) $2y - x = 8$, $5y - x = 14$ and $y - 2x = 1$
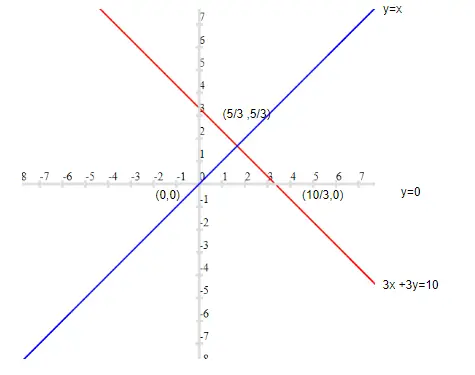
(ii) $y = x$,$y = 0$ and $3x + 3y = 10$
Answer
(i)
Vertices of the triangle so obtained are (-4, 2) (1, 3) (2, 5)
(ii)
(0, 0) (10/3, 0) (5/3, 5/3)
Question 3.
Solve the following system of linear equations graphically:
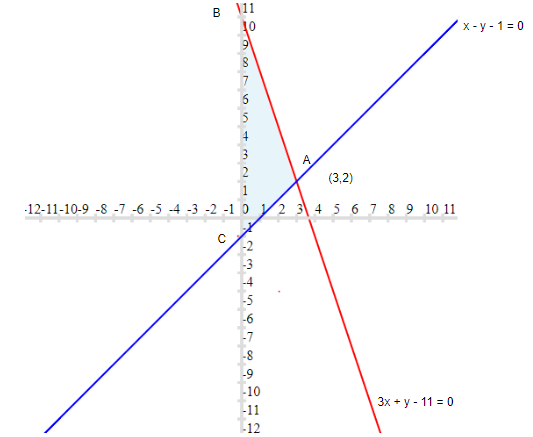
$3x + y - 11 = 0$, $x - y - 1 = 0$
Shade the region bounded by these lines and y - axis. Also, find the area of the region bounded by the these lines and y - axis.
Answer
Lines intersect at (3,2)
Area of Triangle ABC
$=\frac {1}{2} \times 12 \times 3=18$ sq units
Question 4.
Solve:
x + 2y + z = 7
x + 3z = 11
2x - 3y = 1
Answer
Answer x = 2, y = 1, z = 3
Question 5.
Solve graphically the pair of linear equations:
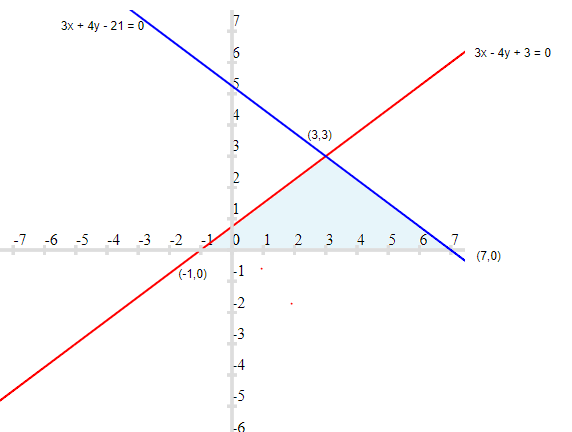
$3x - 4y + 3 = 0$ and $3x + 4y - 21 = 0$
Find the coordinates of the vertices of triangular region formed by these lines and x- axis. Also, calculate the area of this triangle.
Answer
Vertices of the triangle so obtained are (-1,0) ,(3,3) and (7,0)
Area of Triangle
$=\frac {1}{2} B \times H= \frac {1}{2} \times 8 \times 3=12$ sq units
Question 6.
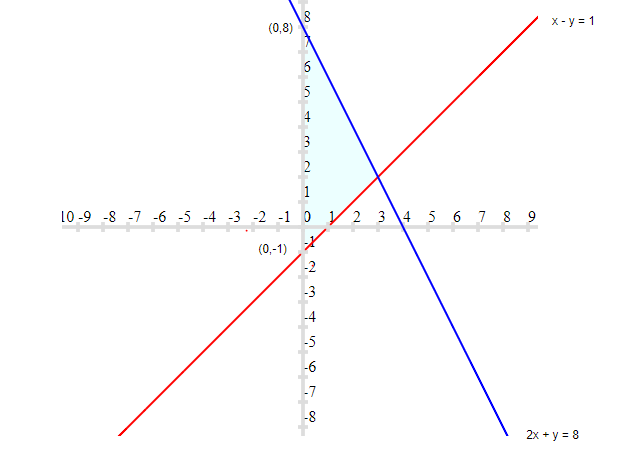
Solve the following system of linear equations graphically:
$x - y = 1$
$2x + y = 8$
Shade the area bounded by these two lines and y - axis. Also, determine this area.
Answer
The lines intersect at (3,2)
Area of the triangle
$=\frac {1}{2}B \times H = \frac {1}{2} \times 9 \times 3= 13.5$ sq units
Question 7.
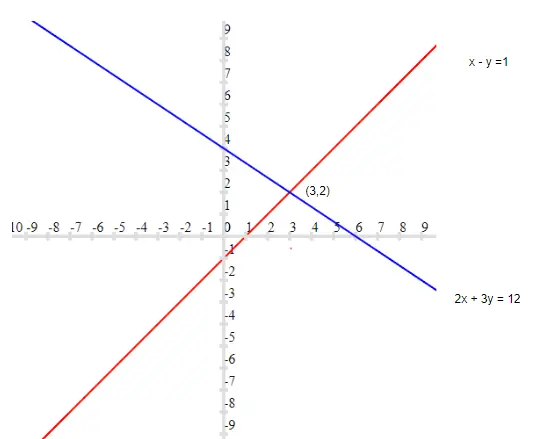
Draw the graphs of the following equations on the same graph paper.
$2x + 3y = 12$
$x - y = 1$
Find the coordinates of the vertices of the triangle formed by the two straight lines and the y- axis.
Answer
The coordinates of the vertices of the triangle formed by the two straight lines and the y- axis 3,2
Question 8.
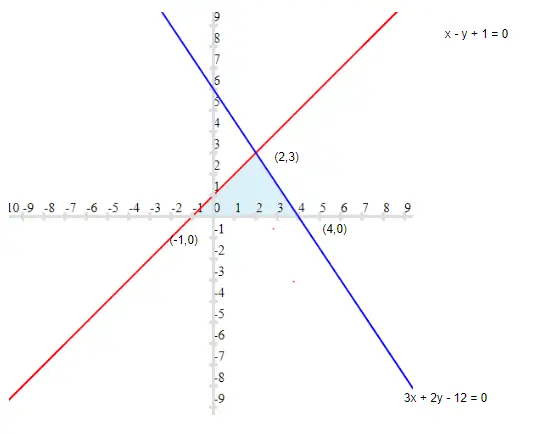
Draw the graphs of x - y + 1 = 0 and 3x + 2y - 12 = 0. Determine the coordinates of the vertices of the triangle formed by these lines and x- axis and shade the triangular area. Calculate the area bounded by these lines and x- axis.
Answer
The coordinates of the vertices of the triangle formed by these lines and x- axis are (-1,0) ,(2,3) and (4,0)
Area of the triangle
$=\frac {1}{2}B \times H = \frac {1}{2} \times 5 \times 3= 7.5$ sq units
Question 9.
Solve the following system of linear equations graphically and find the vertices of the triangle formed by these lines and x - axis:
$x - y - 1 = 0$ ,$x + 1 = 0$
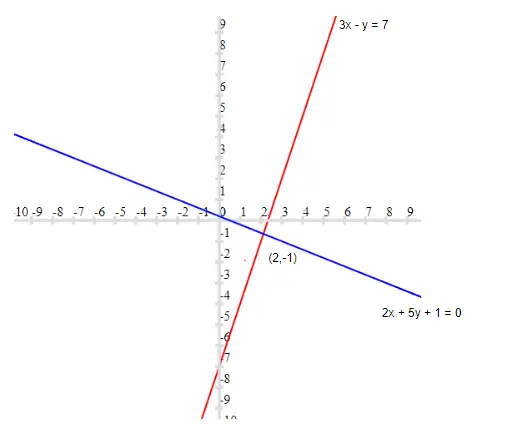
Question 10.
Solve the following pair of equations graphically:
$3x - y = 7$, $2x + 5y + 1 = 0$
Answer
Question 11.
Draw the graph of the following pair of linear equations:
3x + 2y = 15 and 3x - 4y = -3
Also, shade the region bounded by these lines and y = 0. Write the coordinated vertices of the triangle. Question 12.
Solve graphically the pair of linear equations:
3x - 2y + 7 = 0; 2x + 3y - 4 = 0 Question 13.
Determine the values of m and n so that the following system of linear equations have infinite number of solutions:
(2m - 1) x + 3y - 5 = 0
3x + (n - 1) y - 2 = 0 Question 14.
Solve the following system of linear equations graphically and find the vertices of the triangle formed by these lines and x - axis:
x - y - 1 = 0; x + 1 = 0
Summary
This graph questions for class 10 linear equations in two variables with answers is prepared keeping in mind the latest syllabus of CBSE . This has been designed in a way to improve the academic performance of the students. If you find mistakes , please do provide the feedback on the mail.