Welcome to our page on position, distance, displacement, and frames of reference in Physics for Class 11, JEE, and NEET exams. In this page, we will explore the meaning of position, distance, and displacement, as well as their importance in understanding frames of reference. You will also find solved examples to help you master these concepts. Let's dive in!


Given below are some of the questions on this topic of position, distance and displacement.
Qiestion 1 A particle starts from the origin, goes along the X−axis to the point (20 m,0) and then returns along the same line to the point (−20 m,0). Find the distance and displacement of the particle during the trip.
Solution
Let $O$ be the starting point and coordinates are, $O(0, 0)$, $A(20, 0)$ and $B(-20,0)$
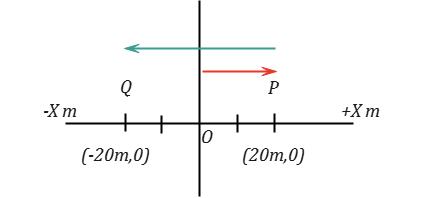
Displacement = distance between final and initial point
$= OB = 20 m$ (negative direction)
Question 2 A man a has to go 50 m due north, 40 m due east and 20 m due south to
reach a field.
(a) What distance he has to walk to reach the field?
(b) What is his displacement from his house to the field?
Solution
It is given in the question that
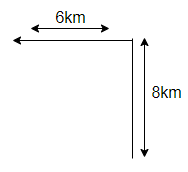
Distance moved in North $AB=50m$
Distance moved in East $BC=40m$
Distance moved in south $CD=20m$
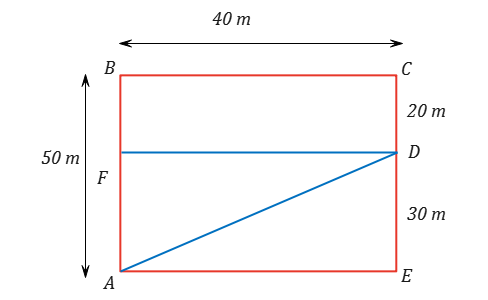
Distance that man has to walk to reach the field $= AB + BC + CD = 50 + 40 + 20 = 110 $
So, man must walk $110 m$ to reach the field.
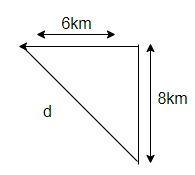
(b) Displacement from man's house to the field, which is AD
$AD = \sqrt{AE^2 + ED^2} = 50 m$
From the triangle AED
$\tan \phi = \frac{DE}{AE} = \frac{30}{40} = \frac{3}{4}$
or,
$\phi = \tan^{-1}(\frac{3}{4})$
Therefore, his displacement from his house to the field is 50 m, $\tan^{-1}(\frac{3}{4})$ north to east.
Assertion reason questions are now asked in various exams be it school class 11 exam or NEET entrance exam or JEE exam. Given below are few assertion reason based questions on this topic of position, distance and displacement.
Directions:
In each of the following questions, a statement of Assertion(A) is given and a corresponding statement of Reason(R) is given just below it. Of the statements, given below, mark the correct answer as:
Options:
A. Both A and R are true, and R is the correct explanation of A
B. Both A and R are true, but R is not the correct explanation of A
C. A is true, but R is false
D. A is false, but R is true
Question 1:
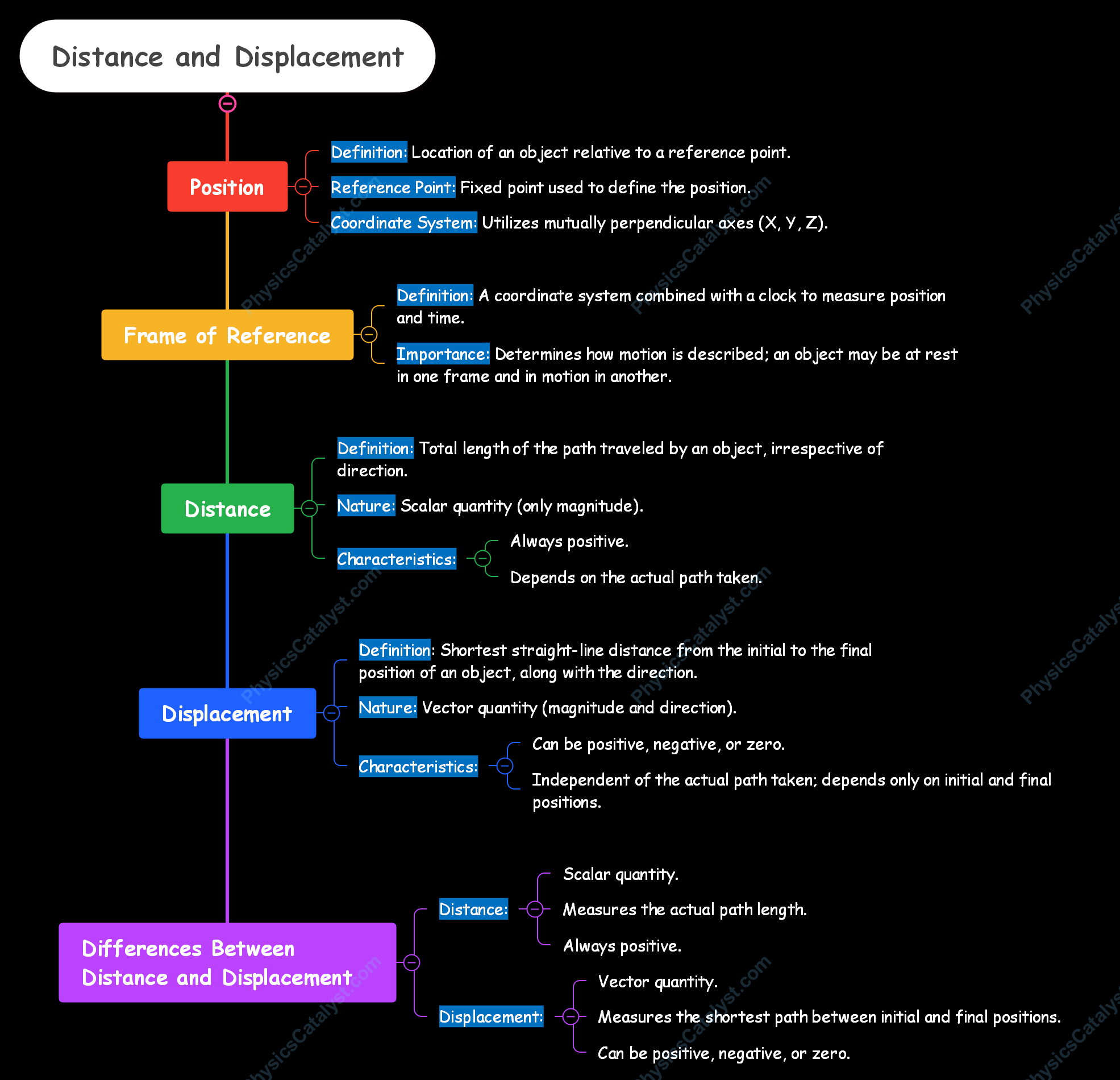
Assertion (A): Distance is a scalar quantity.
Reason (R): Distance does not depend on the direction.
Question 3:
Assertion (A): The magnitude of displacement can be greater than the distance traveled.
Reason (R): Distance is a scalar quantity, while displacement is a vector quantity.
Question 4:
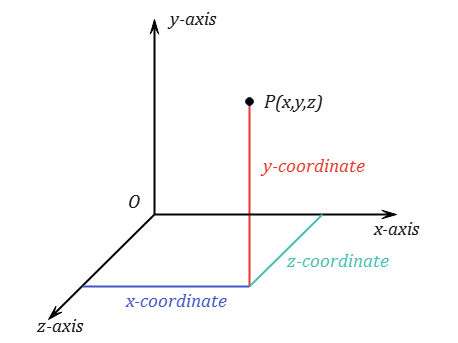
Assertion (A): The position of an object is always specified relative to a reference point.
Reason (R): The reference point is necessary to define the position of an object in a coordinate system.
Question 5:
Assertion (A): The path length is always equal to the magnitude of the displacement.
Reason (R): Both path length and displacement describe the distance between two points.
Question 6:
Assertion (A): An object moving in a straight line has the same distance and displacement.
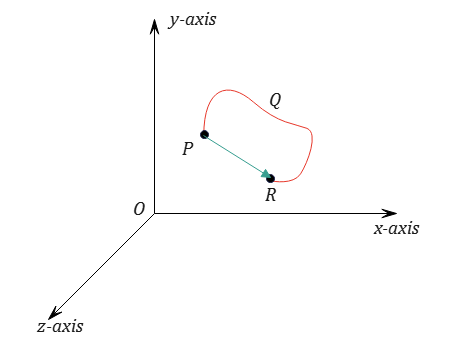
Reason (R): Displacement is the shortest distance between the initial and final position of the object.
Answer 1: A. Both A and R are true, and R is the correct explanation of A
Explanation: Distance is a scalar quantity as it only depends on the magnitude and does not consider the direction, while displacement is a vector quantity that takes direction into account.
Answer 2: A. Both A and R are true, and R is the correct explanation of A
Explanation: Displacement is the shortest distance between the initial and final positions of an object. If an object returns to its starting position, the displacement will be zero, even if it has traveled a certain distance along a path.
Answer 3: D. A is false, but R is true
Explanation: The magnitude of displacement can never be greater than the distance traveled. Displacement is the shortest distance between the initial and final positions, while distance is the total path traveled.
Answer 4: A. Both A and R are true, and R is the correct explanation of A
Explanation: To describe the position of an object, a reference point is required. This reference point is typically the origin of a coordinate system, and the position of the object is given as coordinates relative to this point.
Answer 5: D. A is false, but R is true
Explanation: The path length and magnitude of displacement are not always equal. Path length is the total distance traveled along the path by an object, taking into account all the turns and curves in the path. On the other hand, displacement is a vector quantity that measures the shortest distance between the initial and final positions of the object, considering both magnitude and direction.
In some cases, such as when an object moves in a straight line without changing direction, the path length and magnitude of displacement will be equal. However, in other cases where the object's path isn't straight or it changes direction, the path length will be longer than the magnitude of displacement. The reason statement is true because both path length and displacement do describe the distance between two points, but their definitions and implications are different, as mentioned earlier.
Answer 6: B. Both A and R are true, but R is not the correct explanation of A
Explanation: When an object moves in a straight line, its distance and displacement are indeed the same. However, the reason statement is not the correct explanation for the assertion, as the reason statement explains the general definition of displacement.